



High-Performance Robotic Motor Solutions
Delivering high-performance robotic motor solutions for precise, reliable, and efficient automation.
Groundbreaking advantages.




Take a closer look.
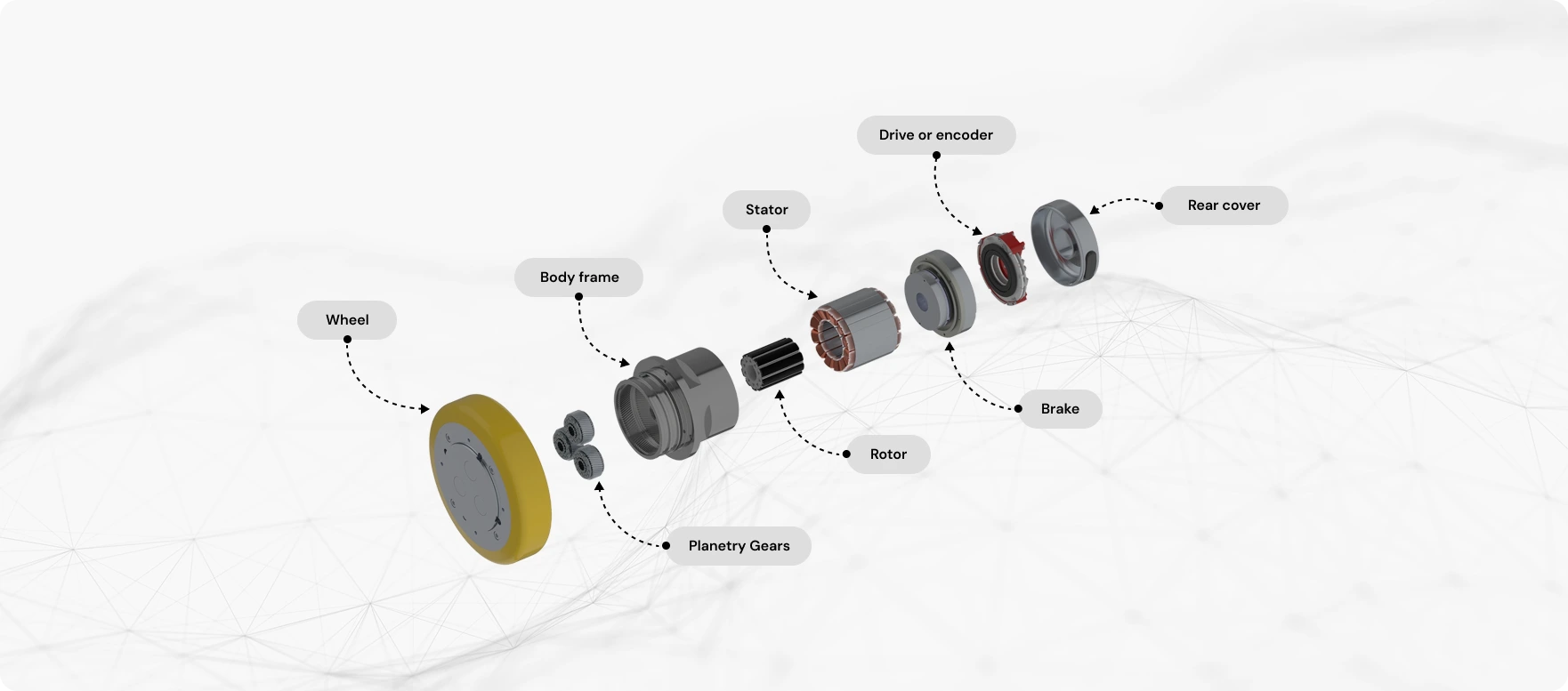
Seamless integrationΓÇï
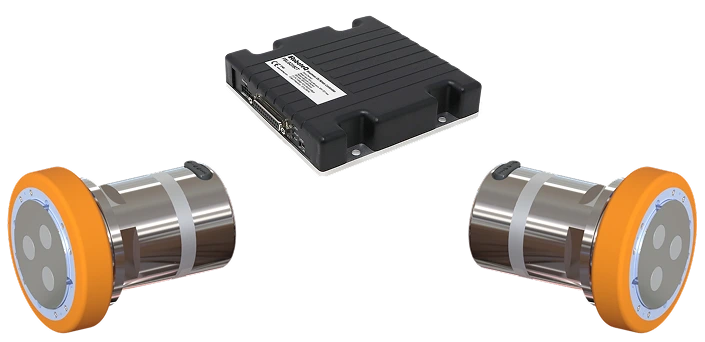
External drive packageΓÇï
2 motors with double incremental encoderΓÇï
Integrated brakesΓÇï
External dual channel driveΓÇï
Cables
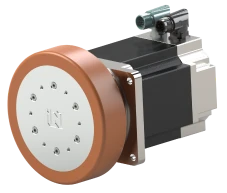
Integrated drives packageΓÇï
2 motors with integrated drive and safetyΓÇï
Integrated brakesΓÇï
Cables

Explore the lineupΓÇï.
Compare all models >
iMR 100ΓÇï
Design for smaller and faster sorting robots

Peak Torque
25 Nm

Peak Power
625 W

Power
350 W

Length
80 ΓÇô 140 mm

Radial Load
1,000 NΓÇï

iMR 500ΓÇï
No jerk motion, no speed oscillation, straight trajectory
Peak Torque
130 Nm
Peak Power
2,400 WΓÇï
Power
1,100 WΓÇï
Length
145 mm
Radial Load
7,500 NΓÇï
iMR 2000ΓÇï
Designed for bigger machines and heavier payloads
Peak Torque
315 Nm
Peak Power
7,000 WΓÇï
Power
3,000 WΓÇï
Length
240 mm
Radial Load
20,000 NΓÇï
Technical Documentation.
We work closely with robotic companies that are seeking precision and a collaborative approach.
| State | SDO (mailbox communication) | Slave-to-Master PDO (process data communication) | Master-to-Slave PDO (process data communication) |
|---|---|---|---|
| Init | No | No | No |
| Pre-Operational | Yes | No | No |
| Safe-Operational | Yes | Yes | No |
| Operational | Yes | Yes | Yes |
| Bootstrap | File access over EtherCAT (FoE) only | No | No |